Сборка собственного квадрокоптера — это увлекательный инженерный процесс, который превращает набор разрозненных деталей в высокотехнологичный летательный аппарат. На первый взгляд, пайка проводов и настройка микросхем могут показаться сверхсложной задачей. Однако, если вы придерживаетесь четкого алгоритма и понимаете логику работы системы, результат превзойдет все ожидания.
Если вы еще не приобрели детали и находитесь на стадии планирования, настоятельно рекомендуем сначала изучить статью о том, как выбрать комплектующие для FPV-дрона. А для тех, чей стол уже заставлен коробками с электроникой, мы подготовили этот подробный гайд.
Что нужно подготовить к сборке
Правильная организация рабочего пространства и наличие необходимого инвентаря — это 50% успеха. Попытки собрать дрон подручными средствами часто приводят к сорванным резьбам и поврежденным платам.
Инструменты (паяльник, мультиметр, отвертки)
Для создания надежных электрических и механических соединений вам понадобится базовый набор оборудования. Все необходимое можно найти в профильном разделе — инструмент для сборки БПЛА:
-
Паяльная станция или портативный паяльник с регулировкой температуры (для силовых кабелей нужно жало типа «топорик» или широкое плоское жало и температура около 380–400°C).
-
Качественный припой и флюс: используйте свинецсодержащий припой (например, 63/37 или 60/40) с канифолью внутри и безотмывочный флюс-гель.
-
Мультиметр: жизненно необходим для проверки цепей на короткое замыкание (прозвонки).
-
Smoke Stopper: защитное устройство (ограничитель тока), которое подключается между аккумулятором и дроном во время первого запуска, чтобы предотвратить сгорание электроники в случае ошибки в пайке.
-
Набор шестигранников: качественные отвертки H1.5, H2.0 и H2.5.
Комплектующие по чек-листу
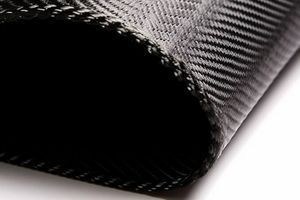
Перед началом разложите перед собой все детали: карбоновую раму, 4 мотора, стек электроники (ESC + FC), FPV-камеру, видеопередатчик (VTX) с антенной, приемник управления, пропеллеры и крепежные элементы. Подготовьте также расходные материалы: термоусадку разных диаметров, нейлоновые стяжки, двусторонний скотч и изоляционную ленту.
Место и безопасность работы с LiPo
Ваше рабочее место должно быть хорошо освещенным и проветриваемым (пары флюса вредны для здоровья). Застелите стол силиконовым термостойким ковриком.
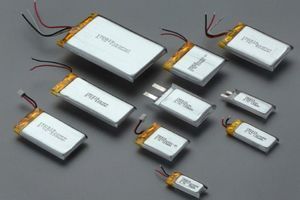
Главное правило безопасности: никогда не подключайте заряженный аккумулятор LiPo к дрону без предварительной проверки мультиметром на отсутствие короткого замыкания на силовых клеммах. Держите аккумуляторы в безопасной зоне, подальше от нагретого паяльника.
Шаг 1. Собираем раму
Сборка начинается с карбонового каркаса. Обработайте торцы карбоновых деталей мелким надфилем или наждачной бумагой под струей воды (чтобы не вдыхать углеродную пыль). Это предотвратит перетирание проводов об острые края рамы в будущем.
Соберите нижнюю часть рамы и установите лучи (армы) согласно инструкции производителя. Обязательно на все металлические винты, которые вкручиваются в металлические гайки или стойки, наносите синий фиксатор резьбы (Threadlocker). Без него от вибраций моторов рама раскрутится прямо в полете.
Шаг 2. Устанавливаем моторы
Протяните провода моторов вдоль лучей к центру рамы. Прикрутите моторы к карбону, используя синий фиксатор резьбы.
Убедитесь, что крепежные винты имеют правильную длину. Если они слишком длинные, они упрутся в медную обмотку внутри статора мотора и вызовут короткое замыкание, которое сожжет ESC.
После затягивания покрутите каждый мотор рукой — он должен вращаться плавно, без трения или заеданий. Зафиксируйте провода на лучах с помощью изоляционной ленты или куска разрезанного пропеллера и нейлоновых стяжек.
Шаг 3. Паяем ESC и полетный контроллер
Этот этап требует максимальной концентрации. Сначала установите на длинные винты в центре рамы резиновые демпферы (антивибрационные стойки), а на них — плату регуляторов хода (ESC).
-
Подготовка контактов: Нанесите флюс на все контактные площадки ESC (большие для аккумулятора и 12 поменьше для моторов). Залудите их припоем.
-
Силовой кабель (Pigtail): Припаяйте толстые провода (обычно красный и черный) с разъемом XT60 к площадкам BAT+ и GND. Обязательно параллельно припаяйте конденсатор (Low ESR), соблюдая полярность (полоса с минусами на конденсаторе — к GND).
-
Моторы: Отмерьте необходимую длину проводов от моторов к ESC, обрежьте лишнее, зачистите на 2-3 мм и залудите концы. Припаяйте три провода от каждого мотора к соответствующим трем площадкам на ESC. Порядок проводов не имеет значения — направление вращения мы потом изменим программно.
-
Монтаж FC: Установите полетный контроллер поверх ESC на демпферы и соедините их комплектным шлейфом.
Шаг 4. Подключаем камеру, VTX и приемник
Все периферийные устройства припаиваются к контактным площадкам полетного контроллера (FC).
-
Приемник (RX): Припаяйте 4 провода (5V, GND, TX, RX). Обратите внимание: провод TX приемника припаивается к площадке RX на контроллере (например, RX2), а провод RX приемника — к TX (например, TX2). Это перекрестное соединение.
-
Видеопередатчик (VTX): Припаяйте провода питания (BAT или 9V, GND) и видеосигнала (Video IN). Для управления мощностью и каналами с пульта припаяйте провод SmartAudio или IRC Tramp к свободному порту TX на FC.
-
Камера: Подключите питание (5V, GND) и сигнальный провод (Video OUT) к соответствующим пинам на контроллере.
После пайки надежно закрепите антенны. Антенна приемника должна находиться подальше от карбоновых деталей, а антенна VTX должна быть жестко зафиксирована в TPU-креплении. Никогда не включайте VTX без прикрученной антенны — он сгорит за несколько секунд.
Шаг 5. Первая прошивка и настройка Betaflight
Подключите полетный контроллер к компьютеру через кабель USB (аккумулятор не подключать!). Откройте программу Betaflight Configurator.
На этом этапе нужно прошить актуальную версию программного обеспечения, настроить порты (UART) в соответствии с тем, куда вы припаяли приемник и VTX, настроить протокол связи (например, Serial / CRSF) и задать направление вращения моторов. Поскольку этот процесс содержит множество специфических нюансов, мы подготовили для вас отдельную развернутую инструкцию. Подробно обо всех цифровых параметрах читайте в статье: как настроить полетный контроллер.
Шаг 6. Тестовый запуск без пропеллеров
Когда программные настройки завершены, наступает время первого физического запуска.
-
Пропеллеры сняты! Это самое главное правило безопасности.
-
Подключите Smoke Stopper к силовому разъему XT60 вашего дрона.
-
Подключите аккумулятор LiPo к Smoke Stopper.
-
Если все припаяно правильно и нет короткого замыкания, индикатор на защитном устройстве загорится зеленым (или выдаст соответствующий звуковой сигнал), а дрон пропоет стартовую мелодию моторов. Если лампочка мигает или гаснет — немедленно отключайте аккумулятор и ищите место короткого замыкания с мультиметром!
-
Если тест успешный, включите пульт, убедитесь в наличии связи (bind) и сделайте тестовый «арминг» (запуск моторов) на минимальных оборотах, чтобы проверить, все ли двигатели вращаются в правильном направлении.
Частые ошибки новичков и как их избежать
Чтобы ваша сборка не превратилась в источник разочарования, обратите внимание на классические ошибки, которые допускают 80% новичков:
-
Холодная пайка: Если вы не прогрели контактную площадку до расплавления припоя, а просто «прилепили» провод, такое соединение отвалится от первой же вибрации, что приведет к падению аппарата.
-
Перепутанная полярность: Внимательно проверяйте цвета проводов питания (+ и -). Обратная полярность мгновенно уничтожит дорогой стек электроники.
-
Установка пропеллеров в доме: Никогда не тестируйте дрон с пропеллерами на столе. FPV-коптер даже на минимальном газе способен нанести серьезные физические травмы или повредить имущество.
-
Забытая антенна: Включение питания дрона для настройки на столе без установленной антенны на видеопередатчике гарантированно выведет его из строя из-за перегрева выходного каскада.
Собирать дроны — это мастерство, которое приходит с опытом. Будьте внимательны к мелочам, проверяйте каждый шаг мультиметром, и ваш первый коптер успешно покорит небо!


 Amass Genuine 122 фото")